
Técnica otimiza controle de próteses
Técnica otimiza controle de próteses
Interface aprimora a captação e o uso de sinais mioelétricos em pessoas que perderam a mão ou parte do antebraço
Interface aprimora a captação e o uso de sinais mioelétricos em pessoas que perderam a mão ou parte do antebraço
Você, leitor, que chegou até aqui, já parou para refletir sobre o papel das mãos na sua experiência de leitura? Talvez você esteja em posse da edição impressa do jornal, os polegares pressionando suavemente as laterais destas folhas, enquanto os dedos indicador, médio, anelar e mínimo se dobram para dar suporte à capa e contracapa. Ou quem sabe esta seja a versão online da reportagem e, com um smartphone firmemente apoiado em sua palma, você desliza o dedo sobre a tela para “rolar” a página do website. Mas pode ser também que você não tenha uma ou nenhuma das mãos e, nesse caso, ler estas palavras pode não ser tão fácil sem algum tipo de assistência.
Para a maioria das pessoas, o controle preciso dos próprios gestos é algo tão instintivo que o esforço necessário para dobrar um único dedo se torna quase inconsciente. No entanto, para quem sofreu amputações, controlar uma prótese de mão traduz-se em um desafio significativo, que exige um período de adaptação e treinamento, além da compreensão de que esses dispositivos podem não atingir o nível de flexibilidade desejado. Agora, porém, um projeto do Centro de Engenharia Biomédica (CEB) da Unicamp está próximo de tornar o controle desses equipamentos mais preciso e sofisticado, por meio de uma interface que aprimora a captação e o uso de sinais mioelétricos.
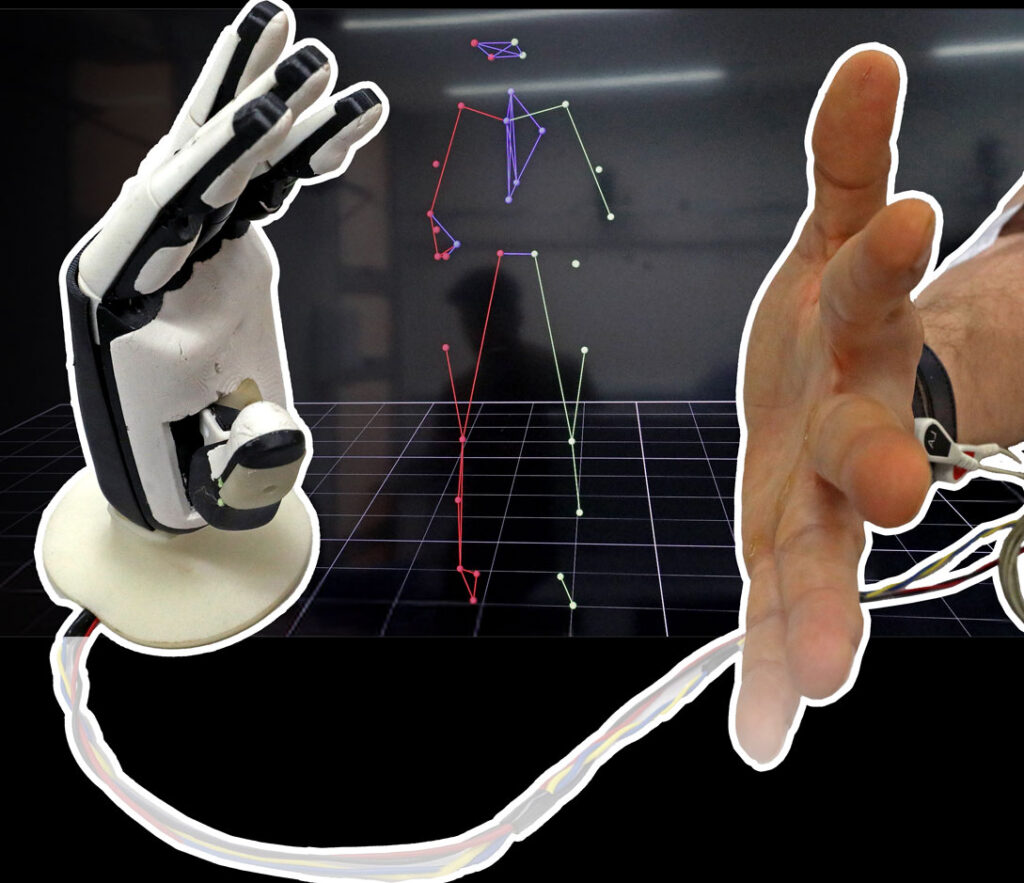
O músculo esquelético produz os sinais mioelétricos quando o sujeito faz força de modo a realizar um movimento. Iniciado no cérebro, tal comando propaga-se através de neurônios da medula espinhal ou do tronco encefálico – os neurônios motores – até chegar às fibras musculares. Essas, por sua vez, funcionam como um amplificador do sinal, que pode ser lido por eletrodos. Como gestos diferentes enviam padrões e amplitudes distintas, os eletrodos conseguem identificar a intenção de cada movimento individualmente. “Então a ideia é que a gente consiga aproveitar a musculatura que originalmente realizava aqueles movimentos para fazer a interface. Ela coleta o sinal, processa esse sinal e faz a intenção do movimento atuar na prótese”, explica o docente Leonardo Abdala Elias, que coordena a pesquisa.
Embora o emprego de sinais do tipo não represente uma novidade na produção de próteses, o projeto da Unicamp utiliza uma técnica por enquanto ausente de dispositivos comerciais. Chamado de eletromiografia de alta densidade, esse recurso utiliza um número bem mais elevado de eletrodos em uma pequena região do corpo, permitindo a coleta de um volume maior de sinais referentes a uma área do músculo. No caso do sistema em desenvolvimento, 128 canais mapeiam toda a região registrada, o que significa 128 sinais capturados para identificar a realização do gesto. A título de comparação, próteses típicas usam entre dois e oito canais para ler a intenção de um movimento.
Financiada pelo Ministério Público do Trabalho (MPT), a tecnologia, segundo a meta dos pesquisadores, atenderá a pessoas que perderam a mão ou parte do antebraço em acidentes de trabalho. No entanto ainda há um longo caminho a percorrer. Neste momento, o projeto já possui um sistema de aquisição, um registro e um processamento dos sinais bem validado e robusto, mas faz-se necessário ainda aperfeiçoar o aspecto mecânico da prótese – produzida por meio de técnicas de impressão 3D a partir de um modelo open hardware de mão biônica fornecido pela empresa Open Bionics. Isso inclui tanto a melhoria da capacidade de movimentação quanto a elaboração de acessórios para o acoplamento da prótese no braço do usuário amputado.
“Nesta etapa, a gente está conseguindo extrair a intenção dos movimentos com um grau de liberdade. A mão humana, no entanto, possui cerca de 25 graus de liberdade, que se referem às formas como ela pode se mover em cada articulação ativando os músculos de maneira sinérgica”, comenta o engenheiro Ricardo Molinari, que desenvolve seu doutorado dentro do projeto. Responsável por compreender as características eletrofisiológicas do sistema neuromuscular e por desenvolver o sistema de movimentação da prótese, Molinari explica que o grupo de cientistas trabalha, por ora, com uma versão simplificada do produto. “O protótipo consegue fazer os principais movimentos do ponto de vista funcional, como pegada de força, precisão e pinça com três dedos, mas realizando um tipo de movimento por vez, o que é uma etapa muito preliminar”, esclarece.
Próximos passos
Um dos principais desafios para melhorar a flexibilidade da prótese passa por promover o controle simultâneo e proporcional dos movimentos, permitindo à mão mecânica mover os dedos de maneira individual e combinada. Além disso, há a necessidade de aprimorar o algoritmo responsável por identificar a intenção dos movimentos a partir dos 128 canais, disponibilizando um controle simultâneo de um maior número de graus de liberdade. Vale ressaltar, no entanto, que a meta dos pesquisadores não se resume a criar a prótese mecânica mais flexível do mercado – algo já disponível, ainda que a preços substanciais –, mas construir um sistema de aquisição e controle aberto, capaz de controlar tanto as próteses simples quanto as mais sofisticadas.
Os cientistas ainda precisam, no entanto, testar a tecnologia em pessoas que não possuem as mãos, algo a ser realizado a partir do ano que vem. Até agora, os testes com voluntários não amputados permitiram treinar o algoritmo que controla a interface e obter dados normativos e padronizados sobre a cinemática da mão humana. Tal levantamento tem sido conduzido pelo pesquisador de pós-doutorado Guilherme Augusto Gomes. Para coletar esses movimentos, a doutoranda Valéria Carrillo modelou, criando um ambiente virtual, o laboratório e a prótese de mão com controle semelhante ao usado no sistema físico de Molinari.
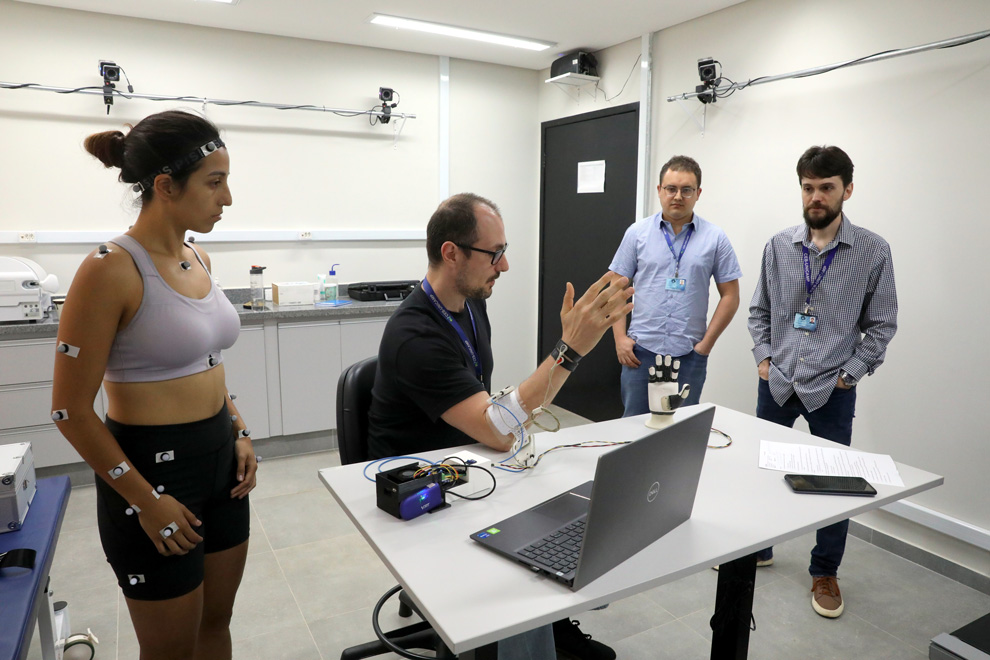
Nos experimentos, oito câmeras de infravermelho posicionadas na Divisão de Neuromecânica e Neurorreabilitação do Laboratório de Pesquisa em Neuroengenharia (NER) do CEB detectam os marcadores retrorreflexivos acoplados ao corpo de um usuário. A tecnologia, além de reconstruir a biomecânica do corpo humano nesse ambiente, busca permitir que os voluntários amputados pratiquem usar a prótese em um ambiente virtual imersivo – com a utilização de óculos 3D – antes de iniciarem o processo com o protótipo físico.
De acordo com Elias, o treinamento no ambiente virtual visa auxiliar voluntários que estejam há anos sem utilizar a musculatura esquelética, fazendo com que se adaptem ao uso da tecnologia para controlar um novo membro. “Pretendemos, ao fazer isso em um ambiente imersivo e não em uma tela, fornecer várias alternativas de interação e permitir que o paciente fique mais engajado no treinamento. Vamos utilizar os testes funcionais em ambiente virtual para treinar a pessoa e, em paralelo, introduzir o uso da prótese física, até o momento da protetização efetiva”, finaliza o docente.